有关同步电机的四种励磁方式,包括直流发电机励磁,交流发电机励磁,晶闸管励磁与三次谐波励磁,同步电机不同励磁方式的特点说明。
一台较小的直流并励发电机和同步电机装在同一轴上,直流发电机发出的电供同步电机励磁。
一台较小的交流发电机和同步电机同轴,为旋转电枢式结构,发出的交流电经整流后供给同步电机励磁。
因整流装置与电枢同轴,故励磁电流可直接送到同步电机的励磁绕组,从而省去集电环导电装置,成为无刷励磁。
在定子槽中,专门装一套三次谐波绕组,切割气隙滋场的三次谐波,产生3倍基频的电动势,整流后供同步电机励磁。
现代电机大都以电磁感应为基础,在电机中都需要有磁场。这个磁场可以由永久磁铁产生,也可通过电磁铁在线圈中通电流来产生。
由于受永磁材料性能的限制,利用永久磁铁建立的磁场比较弱,它大多数都用在小容量电机。
随着新型永磁材料的出现,特别是高磁能积的稀土材料如稀土钴、钕铁硼的出现,容量达百千瓦级的永磁电机已开始研制。
同步电动机的直流励磁电流需要从外部提供,供给其励磁电流的装置称为励磁系统。获得励磁电流的方法称为励磁方式。
这是传统的励磁系统,由装在同步电动机转轴上的小型直流发电机供电。这种专供励磁的直流发电机称为励磁机。
这种励磁方式是将同轴的交流励磁机(小容量同步发电机)或者主发电机发出的交流电经过静止的整流装置变换成直流电后,由集电环引入主发电机励磁绕组供给所需的直流励磁。
这种励磁方式将同轴交流励磁机做成旋转电枢式,并将整流器装置固定在此电枢上一起旋转,组成了旋转整流器励磁系统,将交流励磁发电机输出的交流电整流之后,直接供电给励磁绕组。这样做才能够完全省去集电环、电刷等滑动接触装置,成为无刷励磁系统,该励磁系统大范围的应用于大容量发电机中。
开路将使励磁绕组感应过电压.从而破坏其绝缘:短路将使励磁绕组流过较大的电流。
为避免励磁绕组在启动时遭受较高电压或较大电流的侵害,应在启动时使励磁绕组串联适当阻值的灭磁电阻并形成闭合回路,这个闭合回路可使励磁绕组的摩应电压不至于过高,流过的电流不至于过大。
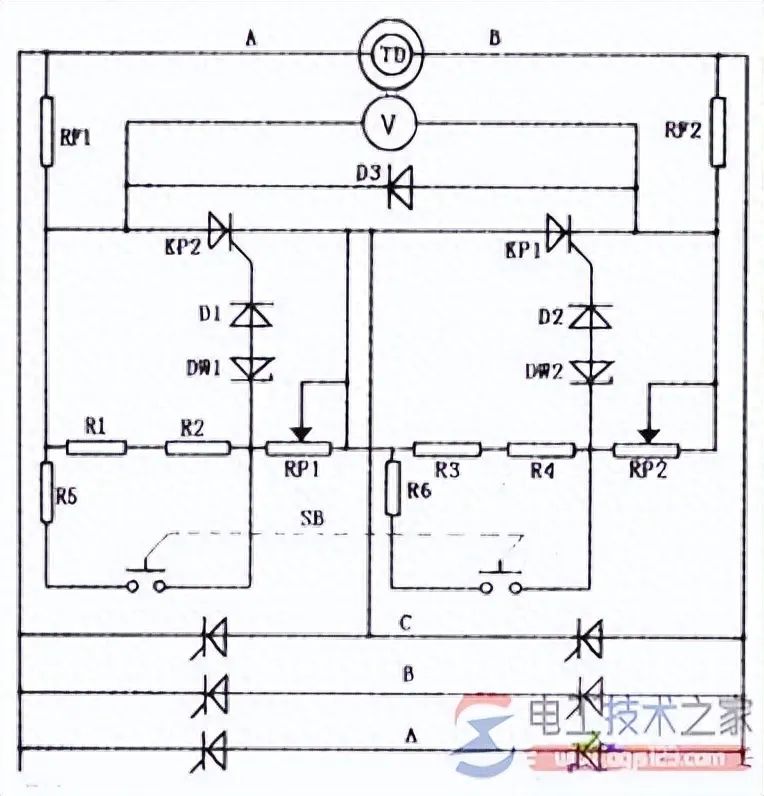
同步电动机投入励磁后.灭磁电阻自动退出.为实现这一电路效果,在励磁回路中加入了灭磁环节。具图中v是励磁电压表,KP1和KP2是灭磁晶闸管(文字符号沿用励磁装置标注)。同步电动机通电启动后至投入励磁前的一段时间内.励磁装置不向三相全控桥上的晶闸管发送触发信号.三相全控桥的晶闸管处于阻断状态,无直流电输出。
同步电动机启动时,转子励磁绕组感应交变电压,当该感应电压在励磁绕组B端为正的半个周期时,二极管D3导通,感应电压经RF2、D3、RF1形成回路。
由于放电电阻RF1和RF2阻值较小,所以感应电压经该回路放电后已经很小,同样由于放电电阻RF1和RF2的纯在,励磁绕组中的电流被限制在较安全的数值范围以内。当感应电压在励磁绕组A端为正(见下图)的半个周期时,二极管D3截止。该半个周期刚开始时感应电压幅值较小,达不到晶闸管KPI和KP2的导通电压,感应电流通过电阻RF1、R1、R2、电位器RP1和电阻R3、R4、电位器RP2、电阻RF2等元件形成回路。
由于该回路电阻值较大,是转子励磁绕组直流电阻的数干倍,所以相当于在开路状态启动,感应电压急剧上升.当感应电压达到一定值后,稳压管DW1和DW2击穿导通(击穿DWl的是电位器RP1上的电压降,之后经二极管D1向晶闸管KP2提供触发电流,晶闸管KP2随之导通:稳压管DW2击穿与晶闸管KP1导通的机理与此类似).晶闸管KP2与KPI导通,励磁绕组的感应电压经过晶闸管KP2和KP1.与放电电阻RF1和RF2构成一个阻值较小的放电回路放电。直到这半个周期结束时.晶闸管KP1和KP2由于电压过零而自行关断。
调整电位器RP1和RP2的阻值.实际上调整的就是励磁绕组感应电压达到多大数值时让晶闸管KP2和KPI导通。
下图中的按钮SB可用来检测灭磁电路正常与否。检测时,使励磁装置处在调试状态.励磁电压、励磁电流均应为设定值,这时操作按钮SB使其触点闭合,电阻R5与R1、R2并联.R6与R3。
R4并联,由于R5和R6阻值较小,这就相对增加了电位器RP1和RP2上的电压降,灭磁晶闸管更容易导通。所以此时励磁电压表指示回零:松开按钮使之复位后,电压表回到正常状态值。
同步电动机在启动过程中,转子励磁绕组经灭磁后的电压波形幅度已经大幅度减小,并被限制在安全数值范围内。
稳压管DWI、DW2对晶闸管KP2和KP1起开关控制的作用,投入励磁后,直流励磁电压在电位器RP1、RP2上的压降低于稳压管DWI、DW2的击穿电压,稳压管不能导通,晶闸管KP2和KPI处于关闭状态。
下图中KPI和KP2的公共端与三相全控整流桥的C相相连,这条连接线叫做熄灭线.当投入励磁后KPI和KP2一定要关闭.否则励磁电路要为灭磁电阻提供电流。投入励磁后.C相上连接的两只整流晶闸管将会先后导通,必将使与之等效并联的晶闸管KPI、KP2在一个电源周期时间内被短路而截止,灭磁电阻自动退出电路。
以上描述的双重措施能够保证励磁装置对同步电动机投入励磁后灭磁电路及时退出工作状态。
同步电动机在降压启动过程中.电动机转速达到同步转速的90%时.给定子绕组投入全压,即IOO%标称电压:电动机转速达到同步转速的95%时(无论全压启动还是降压启动).给转子绕组投入励磁电流,将转速拉人同步。
同步电动机启动时,励磁绕组两端感应一个频率由50Hz向OHz逐渐降低的正弦波电压,该电压频率值与滑差值相对应,如下图中的上部波形所示。励磁装置将转子感应的上述正弦波电压转化为方波信号(如下图中的下部波形所示)送给相关控制电路.控制电路检测方波信号的脉宽,并由此判断脉宽对应的频率以及同步电动机的转速。
当转速达到预设的投全压值时(转速达到同步转速的90%时).相应继电器触点动作,控制投入全电压;当转速达到预设的投励值(转速达到同步转速的95%时)且在方波上升沿时(确保顺极性投励).开始向三相全控桥发送触发脉冲信号.三相全控整流桥开始有整流输出电压.向励磁绕组投入励磁电流。
当按滑差投全压及投励在设定的时间内没办法完成,控制电路将会发出强制投全压及投励的信号,称作定时投全压与投励。一般设定投全压的时间为3s,定时投励的时间为Ss。
触发电路通过调整加到晶闸管上的触发信号的移相角来控制晶闸管的导通程度,亦即控制三相全控桥的整流输出电压,达到调节励磁电压和励磁电流的目的。
下列情况之一的条件出现时.触发信号的移相角应该而且必须改变。触发电路依据这一些控制信息,迅速及时准确控制晶闸管的导通角,保证同步电动机持续稳定地运行。
(l)用电位器或其他适当方式调整给定的励磁电压和励磁电流时:(2)同步电动机在启动过程中转速达到额定转速的95%投励时:(3)同步电动机定子绕组和励磁装置电源电任波动,通过相关控制电路稳定励磁时:(4)同步电动机定子绕组和励磁装置电源电压降低到标称电压80%启动强励时:(5)同步电动机整步过程中。
励磁电流的给定功能是调节控制励磁电压的高低和励磁电流的大小。给定值是根据同步电动机的运行需求.预先设定的一个适当的励磁电流值;稳定调节是根据电源电压的高低.利用负反馈电路控制与调节励磁电流的大小.使之尽可能接近或等于给定的励磁电流;强励功能是电源电压下降到标称电压的80%时,自动强制提高励磁电压和励磁电流的一种技术措施,能够保证同步电动机在电压降低时能够稳定持续运行。
给定电路使用一个电压很稳定的直流电源,该电源的交流输入电压相比来说较高,经过桥式整流和电容器滤波后的电压幅值相应也较高。之后用一个雪崩电压较低的稳压二极管削波稳压后.得到电压幅值较小但基本上没有任何纹波的稳定直流电压。用一个电位器对这个稳定电压调整分压,取得给定电压.用来调整励磁电流。选用这样的直流电源,就为了让给定电压信号很稳定.来保证励磁电流的稳定。为分析方便,我们将这个电压称作U1。
稳定调节采用负反馈调节原理进行。负反馈调节信号电压是随交流电源电压变化的一个直流电压.也用一个电位器对这个电压做调整分压,获得一个随电源电压变化的负反馈信号电压。
我们把这个电压称作U2。将上述电压,UI和U2极性相反的串接起来取其差值U3.用电压U3调整触发电路的移相角,并最终控制三相全控整流桥中晶闸管的导通角,这就实现了对励磁电流的自动控制过程,并保持励磁电流的稳定。
强励电路则实时检测电源电压的变化,当检测到电源电压降低到标称电压80%或以下时,相关电路让一个机械触点由断开变为闭合.或者输出一个类似功能的电子信号。这种电路状态的变化通过后续电路抬高上述励磁控制电压U3的幅值,使励磁装置输出的励磁电压、励磁电流达到未强励时励磁电压、励磁电流的某一倍数,实现强励磁。如果强励磁达到一定时限,例如5秒钟,或者10秒钟,而交流电源电压仍未回升.则励磁装置将退出强励状态。
同步电动机在运行中可能会由于某一些原因出现脱离同步的现象,这种运作时的状态称为失步。同步电动机失步将会引起严重的电流、电压、功率及转速的振荡,对电网和电动机产生很大冲击。同步电动机的失步原因很多.
主要有以下3种:一是电网电压由于某一些原因.如附近其他较大负载投入等.引起电网电压暂时跌落,而导致同步电动机失步,叫作带励失步。二是励磁装置本身故障致使失去励磁引起的失磁失步。三是电网高压侧发生跳闸保护动作之后又重新合闸,因此导致同步电动机失步,即断电失步。
当主控单元检测并确定电机失步后,立即封锁投励信号.使电机进入异步驱动状态,然后电机转速将上升.待进入临界滑差后.装置自动控制励磁系统.按准确强励对电机实施整步,使电机恢复到同步状态。如整步失败,仍存在失步信号,则装置发出眺闸信号动作于跳闸回路。
关键字:引用地址:同步电机励磁的方式有哪些 同步电动机励磁装置的工作原理
前言 本章节是对上一章节的补充,上一章节恒压频比开环控制管理系统采用SPWM控制方式实现,本章节采用SVPWM控制方式实现,也为后续章节的分析奠定一个基础。 一、SVPWM 有关SVPWM控制方式在本章节不展开分析,后续会专门写一章节做多元化的分析。交流电机要输入三相正弦电流的最终目的是在电机空间形成圆形磁场,由此产生恒定的电磁转矩。把逆变器和交流电机视为一个整体,以圆形旋转磁场为目标来控制逆变器的工作,这种操控方法称为“磁链跟踪控制”,磁链轨迹的控制是通过交替使用不相同的电压空间矢量实现的,所以又称为“电压空间矢量PWM控制”,即SVPWM。 与SPWM控制相比,SVPWM有更高的电压利用率,其输出电压最高可提高15%左右。 二
恒压频比开环控制管理系统Matlab/Simulink仿真分析(二) /
宝马公司的为宝马i3和宝马i8配备了具有自主知识产权的eDrive混合式同步电动机,该电动机具有永磁电动机和磁阻电动机优点。宝马公司在这方面取得的进步似乎表明宝马公司找到了一个利用含有较少稀土材料的磁体来制造高功率密度和高效率电动机的方法。 左图为宝马公司2012年专利申请文件中的图纸,该图纸显示一种能提高电动机效率的方法——在电动机内,转子除了磁层,还有两组由数个充气转子凹坑组成的磁通感应组。宝马公司专利申请文件Nº2012/0267977。 宝马i3汽车配置的驱动电动机重50千克,最大输出功率为125千瓦,功率系数为2.5千瓦/千克;该电动机能输出线性功率,转速范围较高,其最高转速为1140
电机驱动能效不论提高多少,都会节省大量的电能,这就是市场对先进的电机控制算法的兴趣日浓的部分原因。三相无刷电机主要指是交流感应异步电机和永磁同步电机。这些电机以能效高、可靠性高、维护成本低、产品成本低和静音工作而著称。感应电机已在水泵或风扇等工业应用中得到普遍应用,并正在与永磁同步电机一起充斥家电、空调、汽车或伺服驱动器等市场。推动三相无刷电机发展的根本原因有:电子元器件的价格降低,实现复杂的控制策略以克服本身较差的动态性能成为可能。 以异步电机为例。简单的设计需要给定子施加三个120°相移的正弦波电压,这些绕组的排列方式能够产生一种旋转磁通量。利用变压器效应,这个磁通量在转子笼内感应出一股电流,然后产生转子磁通量。就
开关磁阻电机(Switch Reluctance Machine,SRM)是一种新型调速电机,相比别的类型的驱动电机如直流电机、异步电机、永磁同步电机,开关磁阻电机的中转子无永磁体材料和绕组,结构最为简单。目前正慢慢的变成为电动汽车驱动电机未来的发展趋势。 开关磁阻电机定子与转子结构 定子铁芯一般是由硅钢片叠制而成,采用凸极结构方便在定子凸极上绕有线圈,即定子绕组,把径向相对的两个绕组串联成一个磁极(即一相),用来向电动机提供工作磁场,下图所示电动机共有3相6个定子绕组,再结合转子的4个极数,该电机被称为三相6/4结构。 转子则是由转子轴和转子铁芯所组成,转子上没有绕组,也没有永磁体,转子铁芯采用凸极结构,工作时负责为磁场提供
吗? /
永磁同步电机的控制策略,例如矢量控制,需要精确的全速范围内的转子位置做解耦变换。而其中转子初始位置最重要,初始位置的误差会影响其后转子位置的计算,因此导致永磁同步电机解耦变换错误,导致没办法对电机进行正确控制。针对传统的磁定位法,可能由于电机静止时转子位置位于定位盲区,普通的直流转矩不能使转子旋转到预定位置,使用改进的磁定位法,通过二次直流转矩定位,精确定位转子初始位置。针对传统的M/T算法存在检测时间、误差大的问题,使用改进的M/T算法,缩短了计算时间和提高了计算精度。 1 改进磁定位法原理 磁定位法原理是通过给逆变器发出直流触发脉冲信号,例如图1脉冲信号为(100)输出给电机定子绕组静止的电流矢量。 其产生的
小型交流伺服电机控制电路设计 ((日)石岛胜著;薛亮,祝建俊译, 石岛胜, 薛亮, 祝建俊)
调速系统控制技术 (侯利民,王巍著)
东芝1200V SIC SBD “TRSxxx120Hx系列” 助力工业电源设备高效
2024 瑞萨电子MCU/MPU工业技术研讨会——深圳、上海站, 火热报名中
STM32N6终于要发布了,ST首款带有NPU的MCU到底怎么样,欢迎小伙们来STM32全球线上峰会寻找答案!
TI 有奖直播 使用基于 Arm 的 AM6xA 处理器设计智能化楼宇
IBM公司科学家实现了“跨芯片”量子纠缠使两块“鹰”(Eagle)量子芯片成功纠缠在一起。每块量子芯片拥有127个量子比特,两块芯片共同 ...
01 Autosar的现状Autosar 曾经被德国汽车制造商普遍的使用,也被美国和日本的其他汽车制造商使用 但是随着新的电子电器 架构和SOA架构,多S ...
引言:激光雷达在无人驾驶应用中主要用来探测道路上的障碍物信息,把数据和信号传递给无人驾驶的大脑,再做出相应的驾驶动作,但室外常见的 ...
现在汽车越来智能了,各种辅助驾驶功能也是越来越先进了,但实现这些先进的功能就离不开汽车雷达这样的一个东西,今天与大家伙儿一起来分享一下雷达相关的问 ...
识读汽车电路图的一般要领1、认真读几遍图注图注说明了该汽车所有电气设备的名称及其数码代号,通过读图注可以初步了解该汽车都装配了哪些 ...
英飞凌携手马瑞利采用AURIX™ TC4x MCU系列推动区域控制单元创新
总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云: